外观
EtherCAT CST 示例
本示例通过创建一个 EtherCAT Master 实例,完成对 EtherCAT 伺服控制器的初始化配置,使伺服电机控制器工作在CST同步周期转矩模式。将 6060h 设置为 0xA,驱动器处于 CST 模式,在周期同步转矩模式下,上位控制器将计算好的目标转矩 6071h 周期性同步的方式发送给伺服驱动器,转矩调节由伺服内部执行。当速度达到限幅值后将进入调速阶段。
EtherCAT CST
硬件连接
需要准备硬件:
- 睿擎工业开发平台支持板卡 1 块
- EtherCAT 伺服驱动器一套(推荐
汇川 SV660N或者LICHUAN-LC10E) - 串口调试器、jlink 调试各一套
用网线将伺服控制器 IN 口与开发板 ETH1 网口连接。伺服电机的电源线和编码器线分别接入电源口和 CN3 连接口,目前示例都是支持双轴的,如图所示:

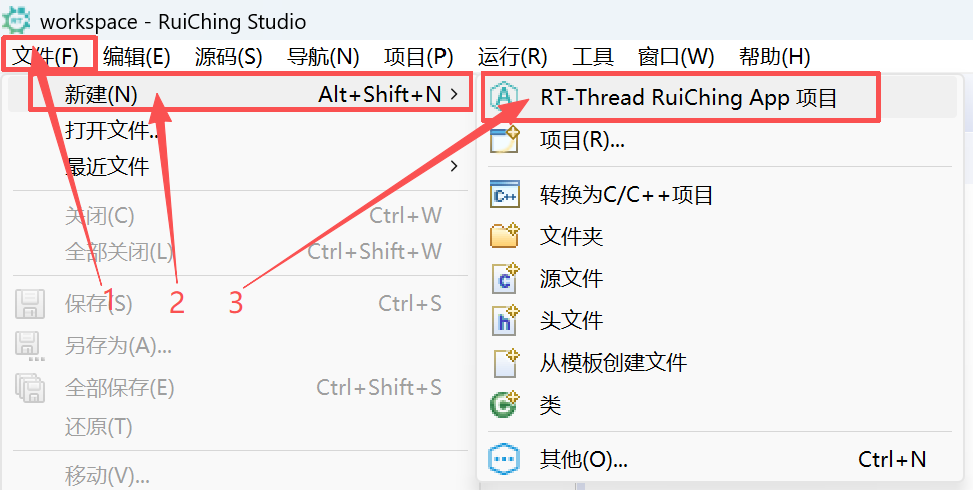
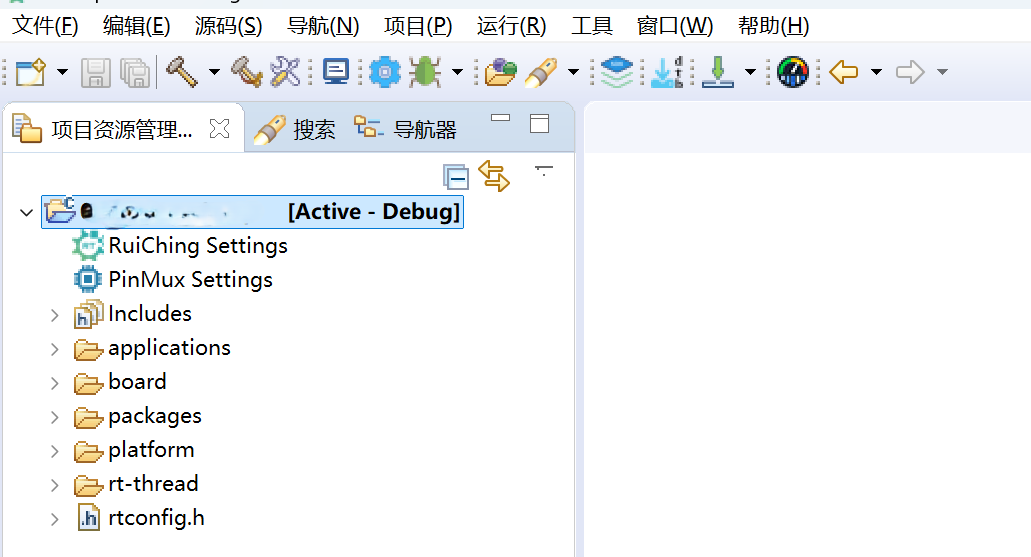
创建工程点击展开

构建工程点击展开


固件下载点击展开


控制命令
| 命令 | 功能描述 | 使用示例 |
|---|---|---|
ect_cst | 启动 EtherCAT 主站服务 | ect_cst |
motor_run | 启动电机运行 | motor_run |
motor_stop | 停止电机运行 | motor_stop |
motor_dir [dir] | 设置电机转动方向(0 或 1) | motor_dir 0 |
核心示例代码
初始化 EtherCAT 主站
- EtherCAT 服务初始化:首先调用
ecat_service_init()函数初始化 EtherCAT 主站服务的核心组件。 - 网络接口配置:指定 EtherCAT 主站使用的网络接口,如 "e1"。
- 主站结构体初始化:通过
ecat_master_init(&cst_master)函数初始化主站结构体。 - 获取从站数量:调用
ecat_slavecount(&cst_master)获取总线上的从站数量。
ecat_service_init();
if (ifname)
{
cst_master.nic0 = ifname;
}
err = ecat_master_init(&cst_master);
if (err)
{
rt_kprintf("ethercat master init failed, err:%d\n", err);
return err;
}
slave_counts = ecat_slavecount(&cst_master);
rt_kprintf("Found slaves count:%d\n", slave_counts);配置从站 PDO 映射
- 定义 PDO 条目信息
ec_pdo_entry_info_t,包含索引、子索引和数据位长度。 - 定义 PDO 信息
ec_pdo_info_t,指定 PDO 索引和包含的条目。 - 定义同步管理器配置
ec_sync_info_t,配置输入输出方向和 watchdog 设置。 - 配置从站结构体
ec_slave_config_t,包含 DC 同步参数和同步管理器配置。
static ec_pdo_entry_info_t slave1_rxpdo_entries[] = {
{ 0x6040, 0x00, 16 },
{ 0x6071, 0x00, 16 },
{ 0x60B2, 0x00, 16 },
{ 0x6060, 0x00, 8 },
{ 0x6072, 0x00, 16 },
{ 0x607F, 0x00, 32 },
{ 0x60E0, 0x00, 16 },
{ 0x60E1, 0x00, 16 },
};
static ec_pdo_entry_info_t slave1_txpdo_entries[] = {
{ 0x6041, 0x00, 16 },
{ 0x6064, 0x00, 32 },
{ 0x606C, 0x00, 32 },
{ 0x6077, 0x00, 16 },
{ 0x6061, 0x00, 8 },
};
ec_pdo_info_t slave_pdos[] = {
{ 0x1600, 8, slave1_rxpdo_entries },
{ 0x1a00, 5, slave1_txpdo_entries },
};
ec_sync_info_t cia402_syncs[] =
{
{ 2, EC_DIR_OUTPUT, 1, &slave_pdos[0], EC_WD_DISABLE },
{ 3, EC_DIR_INPUT, 1, &slave_pdos[1], EC_WD_DISABLE },
};
static ec_slave_config_t slave_cia402_config;
slave_cia402_config.dc_assign_activate = 0x300;
slave_cia402_config.dc_sync[0].cycle_time = cst_master.main_cycletime_us * 1000;
slave_cia402_config.dc_sync[0].shift_time = 500000;
slave_cia402_config.dc_sync[1].cycle_time = 0;
slave_cia402_config.dc_sync[1].shift_time = 0;
slave_cia402_config.sync = cia402_syncs;
slave_cia402_config.sync_count = sizeof(cia402_syncs) / sizeof(ec_sync_info_t);应用从站配置并启动主站
- 遍历所有从站,调用
ecat_slave_config()为每个从站应用配置。 - 调用
ecat_master_start()启动 EtherCAT 主站。 - 使用
ecat_check_state()检查从站是否进入 OPERATIONAL 状态。
for(int i=0;i<slave_counts;i++)
{
ecat_slave_config(&cst_master, i, &slave_cia402_config);
}
ecat_master_start(&cst_master);
state = EC_STATE_OPERATIONAL;
err = ecat_check_state(&cst_master, slave_counts - 1, &state, 20000000 * 3);
if (err != RT_EOK)
{
rt_kprintf("Not all slaves reached operational mode.\n");
return err;
}实现电机业务逻辑
- 首先更新伺服状态机并检查运行标志,若停止则发送禁用命令。
- 根据控制字状态配置运行模式、转矩限制和目标转矩。
- 在运行状态下,根据方向标志更新目标转矩值。
while (1)
{
if (servo_run == 0)
{
for (size_t slave = 0; slave < slave_counts; slave++)
{
rmap = servo_rpdo_get(&cst_master, slave);
tmap = servo_tpdo_get(&cst_master, slave);
servo_switch_op(rmap, tmap);
rmap->control_word = 0x2;
}
goto stop;
}
for (size_t slave = 0; slave < slave_counts; slave++)
{
rmap = servo_rpdo_get(&cst_master, slave);
tmap = servo_tpdo_get(&cst_master, slave);
if (rmap->control_word == 7)
{
rmap->mode_of_operation = 0xA;
}
if (rmap->control_word == 0xf)
{
rmap->torque_limit_pos = -3500;
rmap->torque_limit_neg = 3500;
rmap->max_motor_speed = (1 << 17);
rmap->max_torque = 3500;
if (servo_dir == 0)
{
rmap->target_torque = 200;
}
else
{
rmap->target_torque = -200;
}
}
servo_switch_op(rmap, tmap);
}
stop:
rt_thread_mdelay(5);
}示例运行
初始化 EtherCAT 主站
msh > ect_cst启动电机运行
msh > motor_run改变电机方向
msh > motor_dir 0/1停止电机
msh > motor_stop使用 IDE 调试并运行程序,初始化完 EtherCAT 主站后,在终端输入motor_run 运行电机,可以观察到电机旋转。EtherCAT 示例运行后,电机会顺时针旋转。驱动器风扇会开启,面板显示8Arn字符。
在终端输入motor_stop 可以停止电机。
在终端输入motor_dir 0/1 可以改变电机方向。