外观
QT Demo 编译构建
前言
本文档主要演示如何安装在 Ubuntu 上安装 QT Creator,在已有的 Qt Demo 工程进行编译和命令行方式编译 QT Demo,放在 RC-Pi3506 上运行
开发环境
Windows 开发环境: Windows11 64bit
Linux 开发环境: Oracle VirtualBox、Ubuntu22.04.4 64bit
Qt Creator: 5.12.12
IDE 编译 QT Demo
下载 QT Creator
根据笔者的使用经验,推荐 Qt 版本为 Qt5.12 和 Qt5.15 (两者兼容)。本篇我用的是 Qt5.12 。
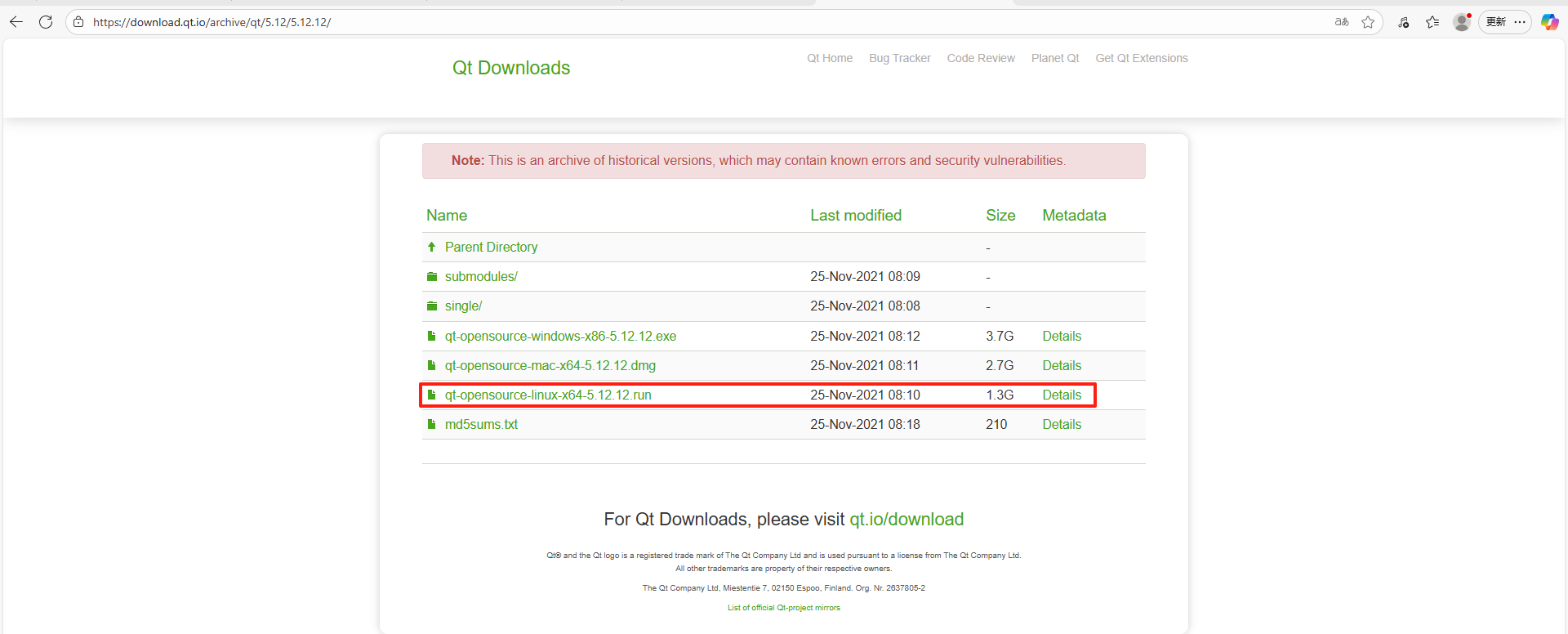
下载网站:https://download.qt.io/archive/qt/5.12/5.12.12/
下载下来即可,注意因为 qt 是国外软件所以国内访问需要翻墙,这里已经给大家下载好了供大家下载,在百度网盘的睿擎工业平台/02-常用工具目录,供大家下载

安装 QT Creator
将 qt-opensource-linux-x64-5.12.12.run 拷贝到 Ubuntu 的家目录下。
scp D:\qt-opensource-linux-x64-5.12.12.run rtt@10.21.8.96:/home/rtt/加个可执行权限
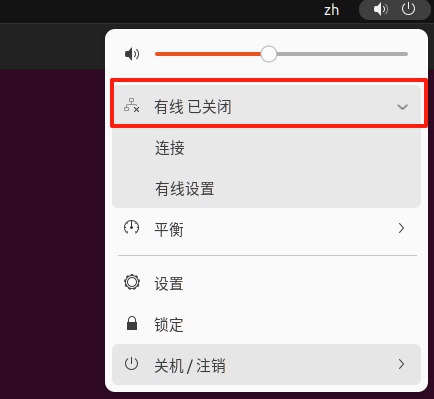
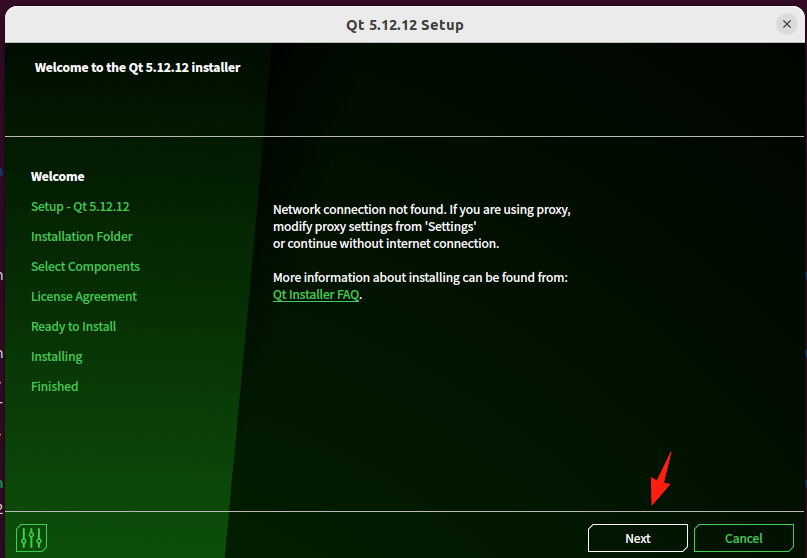
chmod +x qt-opensource-linux-x64-5.12.12.run安装前请断开 Ubuntu 的网络连接,点击右上角的网络图标,关闭网络连接即可,对于不同版本的 Ubuntu,这个图标位置和界面可能不一样,大家知道这个意思即可!
执行下面指令安装 Qt。需要输入用户密码,加 sudo 安装一般默认安装在/opt/路径下。当然你不加 sudo 那就会安装在家目录下。
sudo ./qt-opensource-linux-x64-5.12.12.run
点击 Next
点击 Next
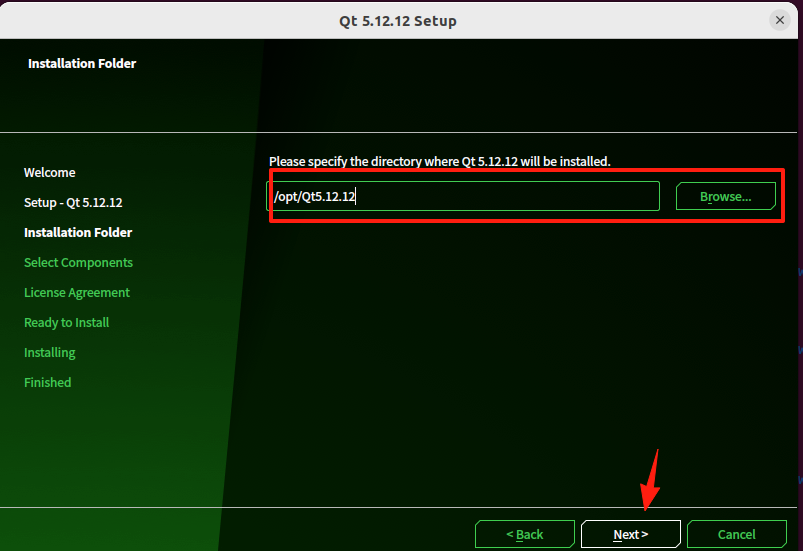
填写安装路径,笔者一般安装在/opt 路径下,默认即可。
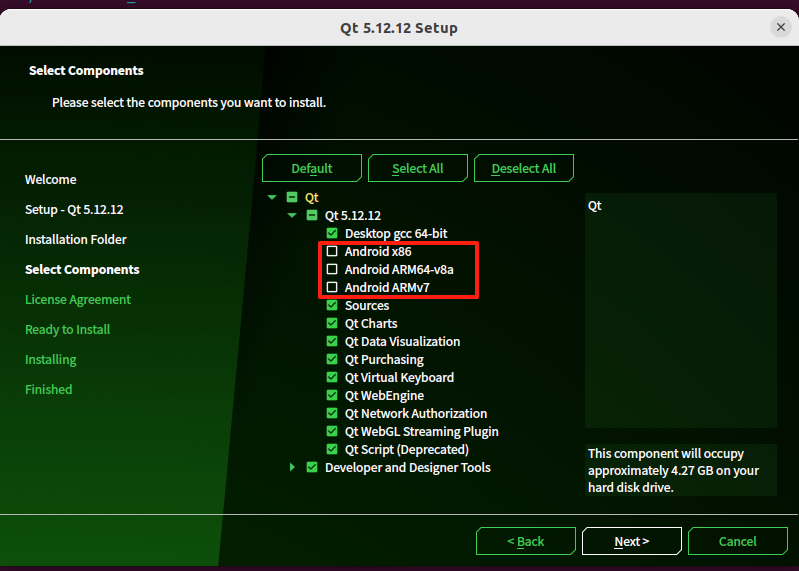
除安卓其他都选上。选择的 Qt 版本为 5.12.12,Qt Creator 版本为 5.0.2,再点击 Next。
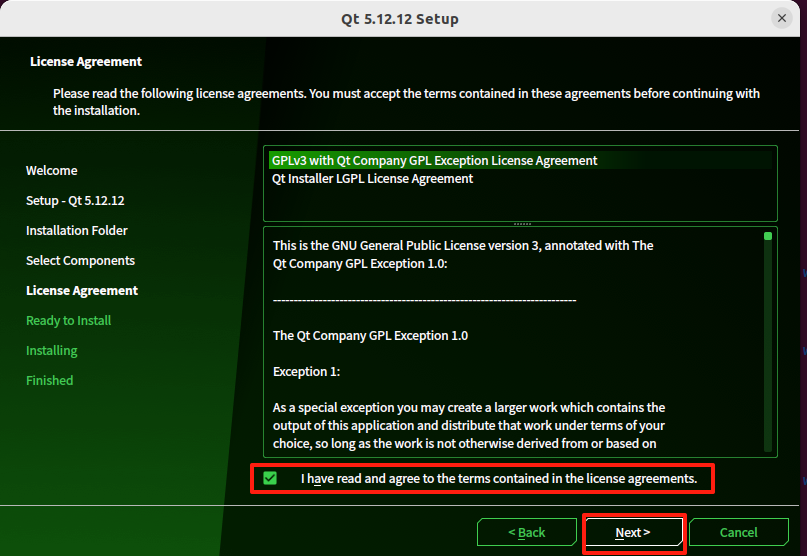
这里我们同意 Qt 的协议。
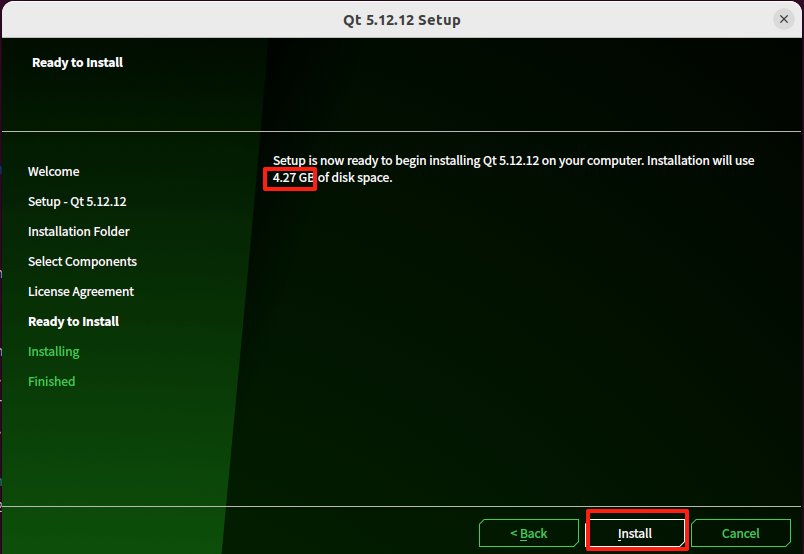
可以看到需要 4.27GB 的大小,在线安装的 Qt5.15 版本更大,约 10GB,所以选择这个离线的 Qt5.12.12 版本还是不错的。
安装完成,点击 Finish。
启动 QT Creator
启动 QtCreator 时遇到打不开界面需要安装 Qt 桌面的环境依赖
sudo apt-get update
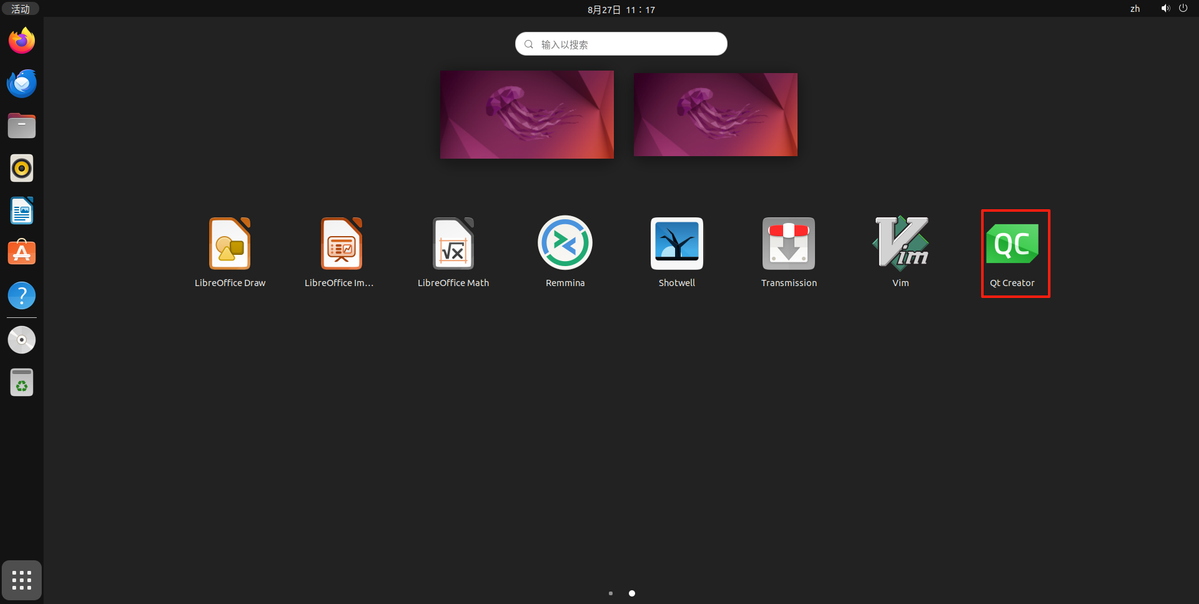
sudo apt install libxcb-xinerama0 libxcb-xinput0 libxcb-xkb1 libxcb-randr0 libxcb-icccm4 libxcb-image0在 Ubuntu 左下角的“显示应用”菜单中点击,就可以看到 QtCreator 的图标了,再点击 QtCreator 的图标就能启动 QtCreator 了
配置 QT Creator
配置交叉编译工具链
配置 QT Creator 就是配置 RC-Pi3506 的交叉编译工具链包括 g++和 qmake
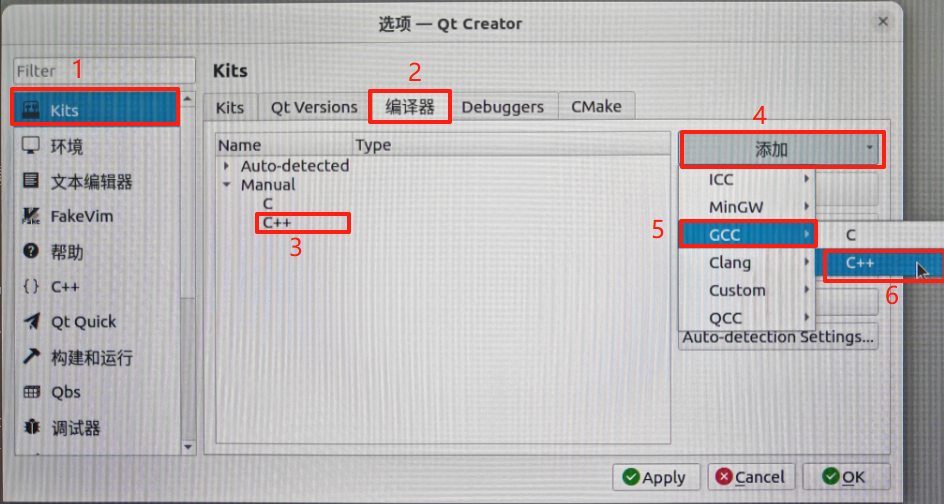
点击"工具 -> 选项 -> Kits -> 编译器->Manual->添加” ,如下图所示添加 C++工具链
选择平台交叉编译工具链中的 arm-buildroot-linux-gnueabihf-g++,然后点击 Open 确认。具体路径为:
/home/rtt/work/ruiching_3506_release/buildroot/output/rockchip_rk3506_qt/host/bin/arm-buildroot-linux-gnueabihf-g++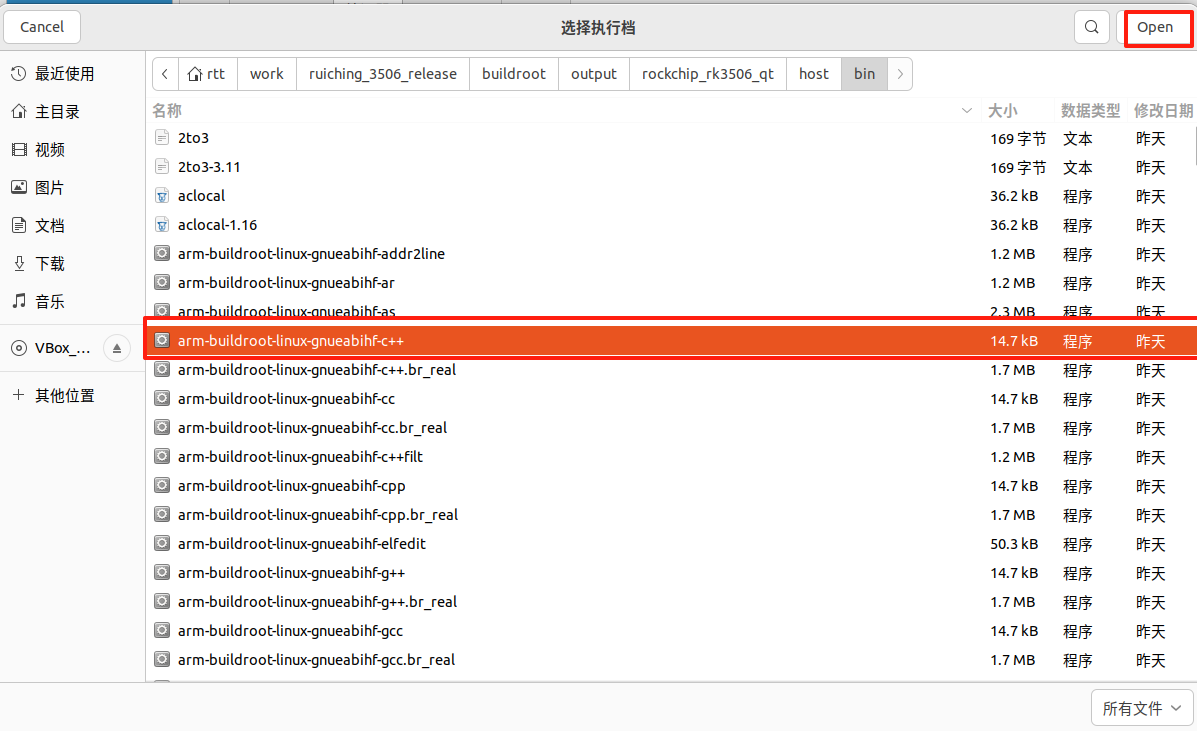
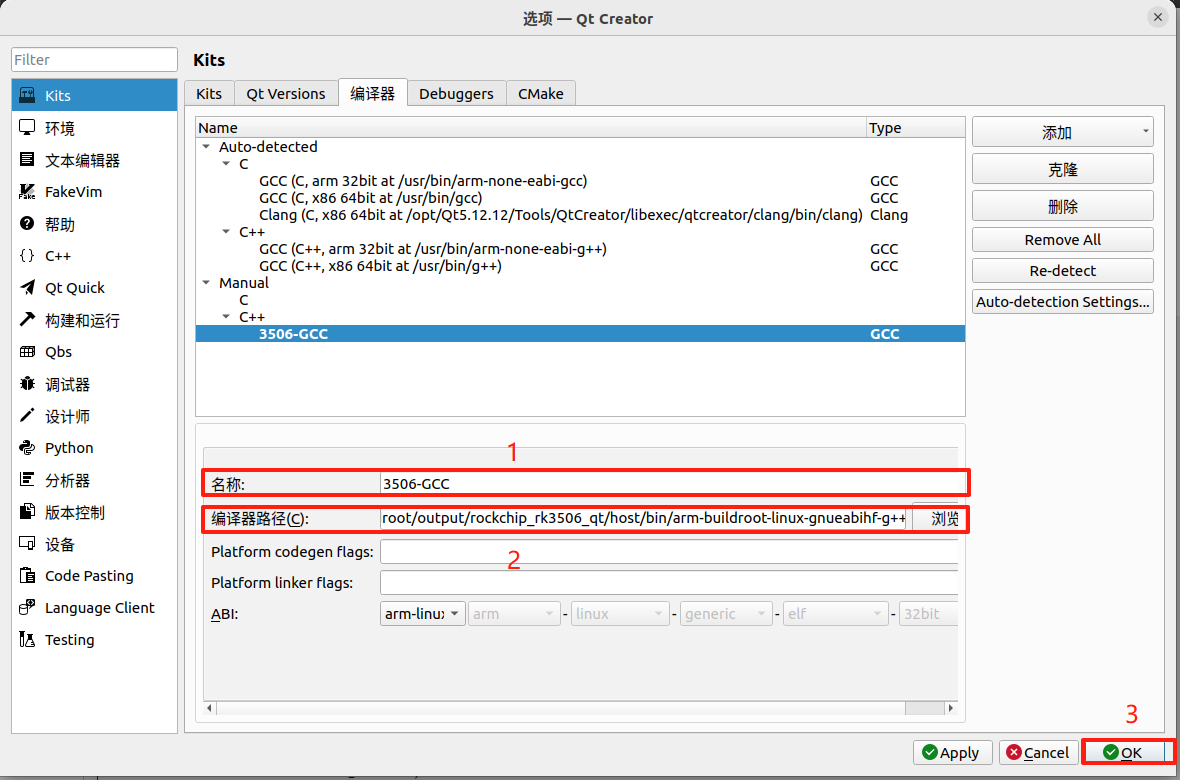
选择好 Name 和编译器路径要点击 OK
配置 Qt Versions
点击"工具 -> 选项 -> Kits -> Qt Versions -> Manual -> 添加”,选择平台 qmake
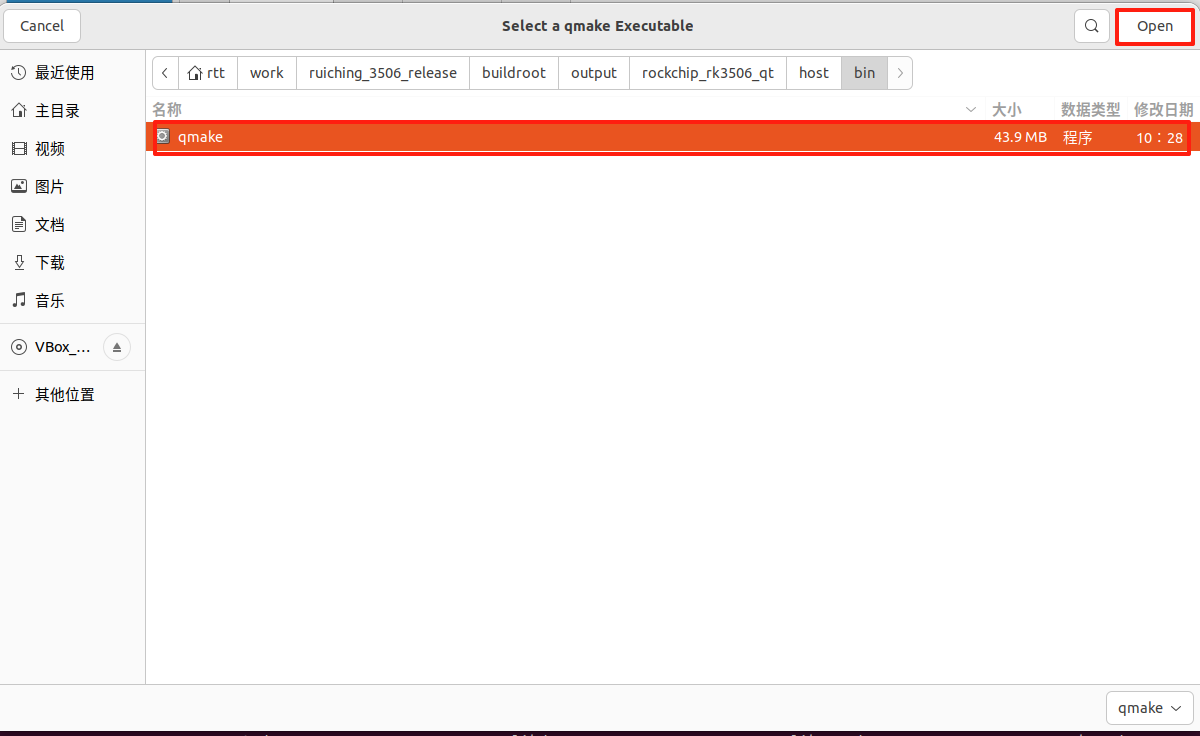
然后点击 Open 确认。具体路径为:
/home/rtt/work/ruiching_3506_release/buildroot/output/rockchip_rk3506_qt/host/bin/qmake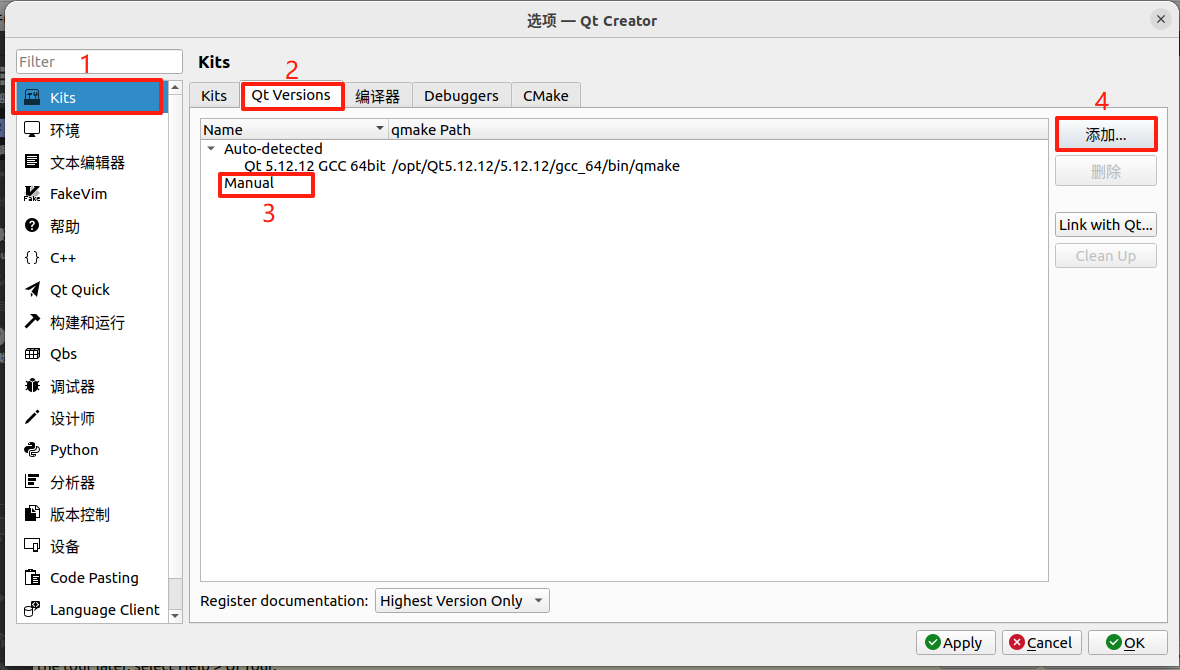
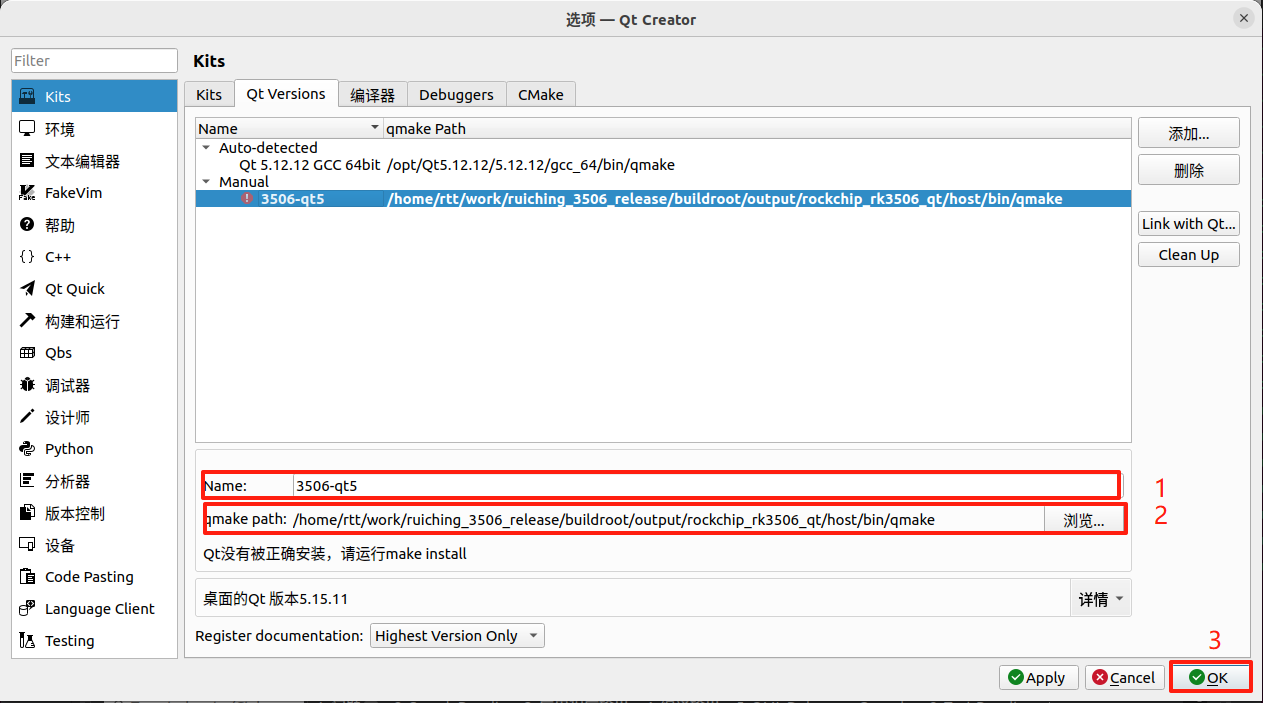
选择好 Name 和 Qmake 路径要点击 OK
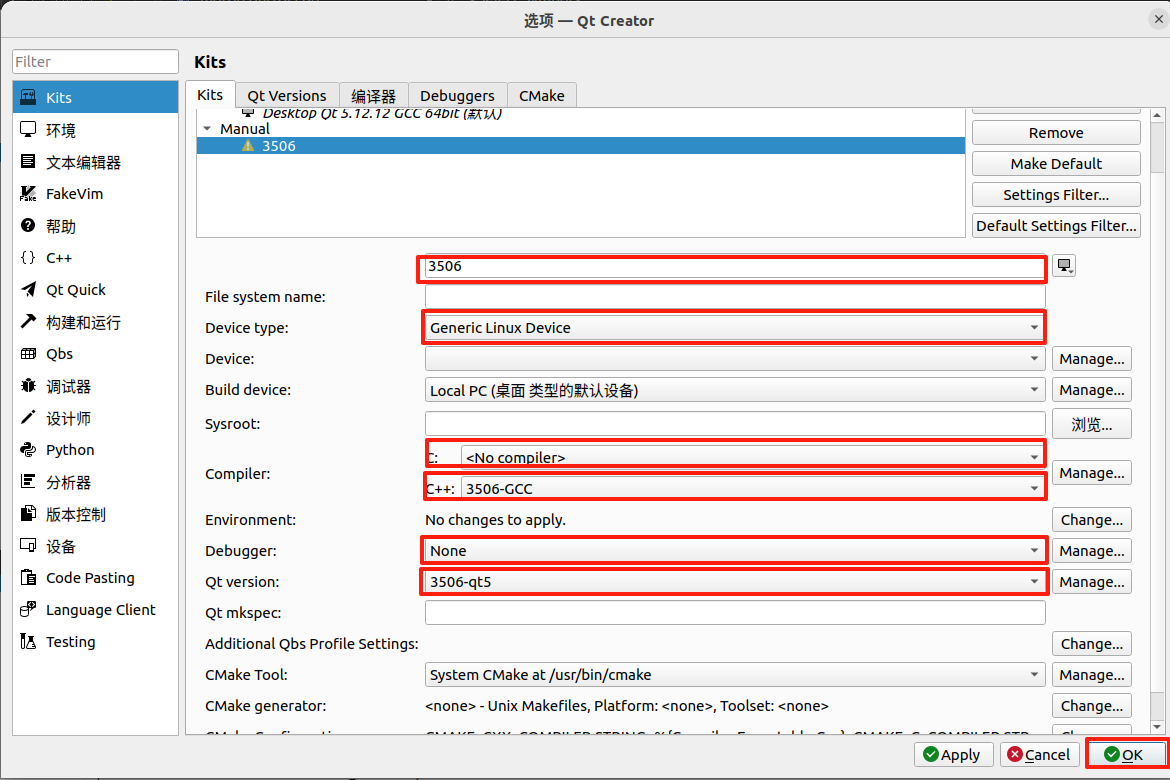
配置 Kits
请参照下图配置 Kits 各选项。点击"Kits -> Manual-> 添加”
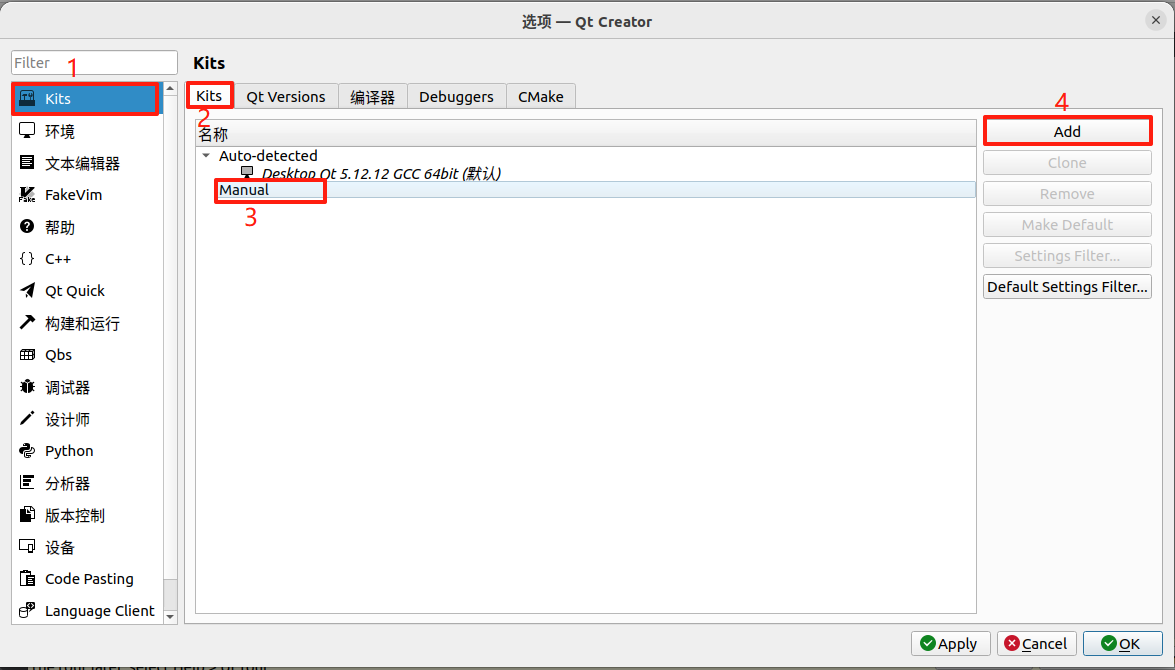
将 Name 修改为 3506,Device type 选择"Generic Linux Device"。 Compiler 的 C++选择"3506-GCC",Debugger 选择"None"。 Qt version 选择"3506-qt5",点击 Apply,然后点击 OK 完成配置。
编译 QT Demo
打开工程 MotorCtrl.pro
然后点击 Open 确认。具体路径为:
/home/rtt/work/ruiching_3506_release/app/qt_demo/Apps/MotorCtrl.pro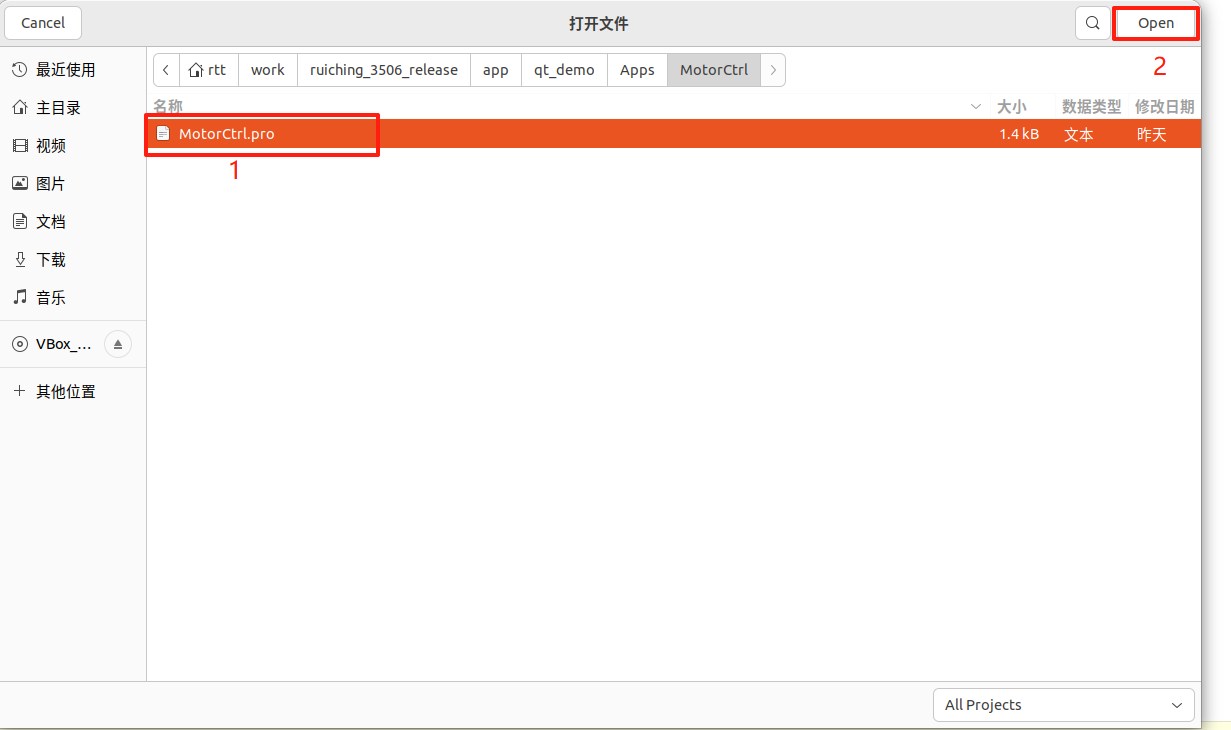
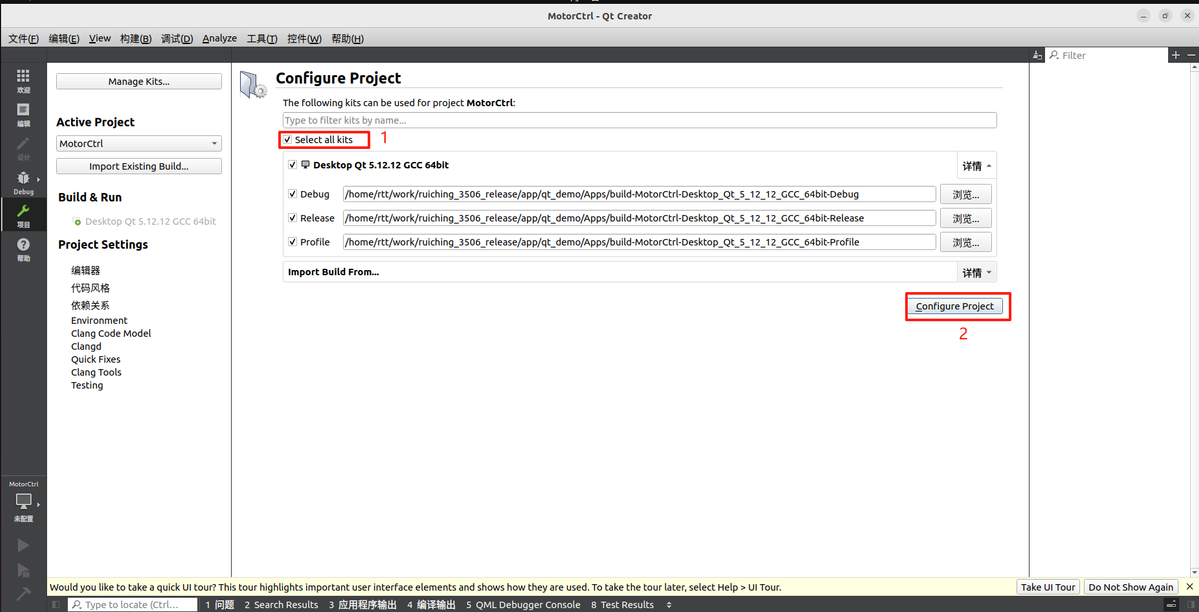
然后将 Select all kits 对勾打上,在选择 Configure Project
右击 MotorCtrl 工程,点击构建 “MotorCtrl” 进行 Qt 工程编译
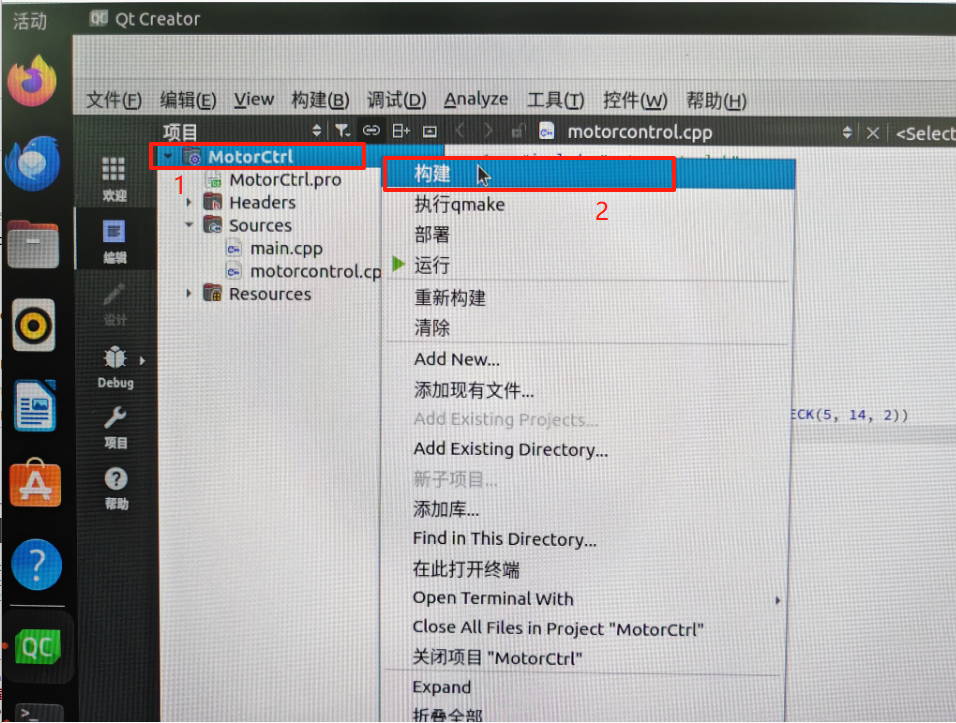

编译完成后,将生成可在 RC-Pi3506 上运行的 ARM 端 Qt 程序镜像
$ file app/qt_demo/bin/MotorCtrl MotorCtrl: ELF 32-bit LSB pie executable, ARM, EABI5 version 1 (GNU/Linux), dynamically linked, interpreter /lib/ld-linux-armhf.so.3, for GNU/Linux 3.2.0, not stripped
QMake 编译 QT Demo
进入 MotorCtrl 工程源码目录
cd app/qt_demo/Apps/MotorCtrl执行 qmake 命令生成 Makefile 文件
/home/rtt/work/ruiching_3506_release/buildroot/output/rockchip_rk3506_qt/host/bin/qmake .再执行 make 命令编译生成可在 RC-Pi3506 上正常运行的 ARM 端 Qt 程序镜像
makeARM 端 Qt 程序镜像
$ file app/qt_demo/bin/MotorCtrl MotorCtrl: ELF 32-bit LSB pie executable, ARM, EABI5 version 1 (GNU/Linux), dynamically linked, interpreter /lib/ld-linux-armhf.so.3, for GNU/Linux 3.2.0, not stripped
放在 RC-Pi3506 上运行
直接 adb 进板子
选中 usb 设备
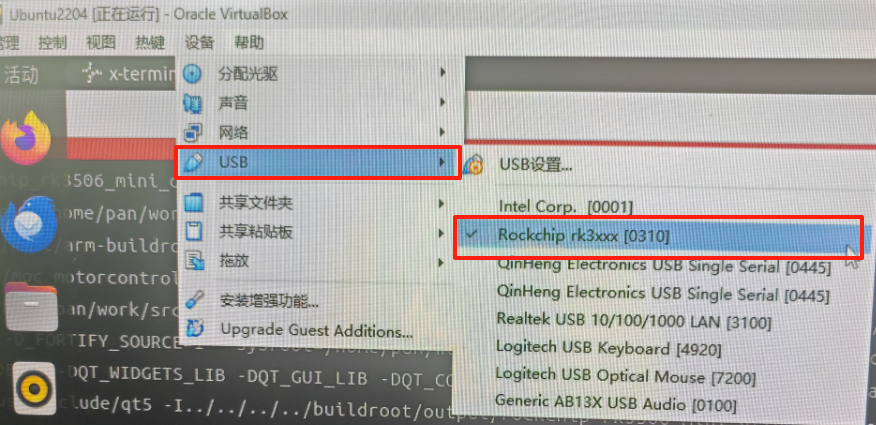
查看 adb 设备是否识别处理
$ adb devices * daemon not running; starting now at tcp:5037 * daemon started successfully List of devices attached f896e2965667fc18 deviceadb push 到板子上
adb push MotorCtrl /tmp/执行板子上得程序
root@rk3506-buildroot: ./tmp/MotorCtrl &
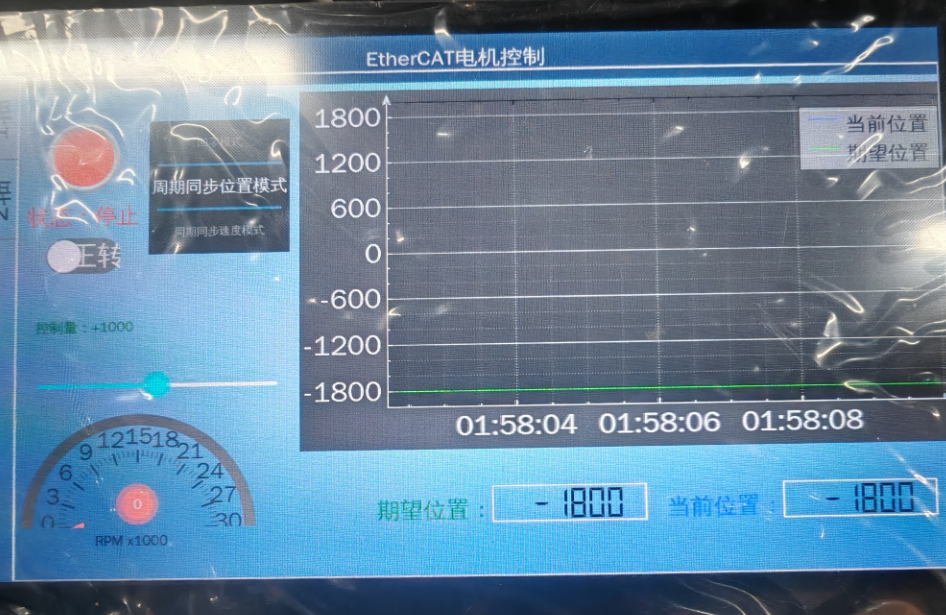
7 寸屏幕上显示 QT Demo 界面如下图所示